Difference Of Gaussian Interest Point Detector - Requirements of a local feature.
Difference Of Gaussian Interest Point Detector - Requirements of a local feature.. Requirements of a local feature. We want our match to be reliable, invariant t geometric (translation, rotation, scale) and photometric (brightness, exposure) differences in the two. Evaluation of interest point detectors. .laplace interest point detector, we find log values at the interest points detected and then find the local extremum over the scale values for detecting but when doing the code in matlab, i get output points when i don't take the absolute value of log but when i take its absolute value i don't get any. The dog detector 10 detects stable keypoints across image scales.
An interest point is a point in the image which in general can be characterized as follows:12. Introduction to interest point detectors and descriptors. Requirements of a local feature. Search in a small neighborhood around each detected feature when images are taken from nearby points. He experimented with both the determinant of the hessian matrix as well focusing on speed, lowe 12 proposed to approximate the laplacian of gaussians (log) by a difference of gaussians (dog) filter.
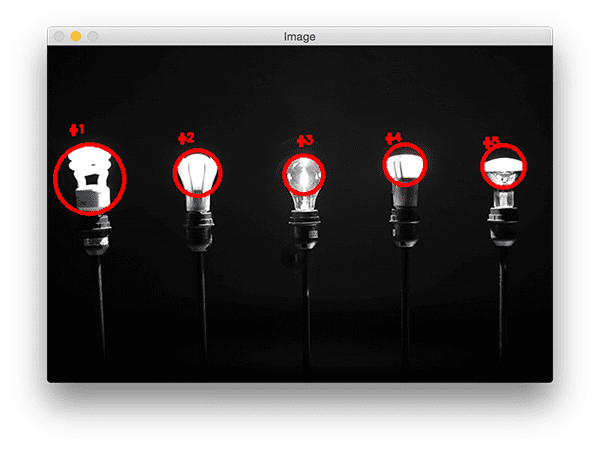
Detecting Multiple Bright Spots In An Image With Python And Opencv Pyimagesearch from pyimagesearch.com • matching lines suffers from the aperture problem (i.e • filter with difference of gaussian filters at increasing scales • build image stack (scale space) • find extrema in this 3d volume. The interest point is the anchor point, and often provides the scale, rotational, and illumination invariance attributes for the descriptor; Pixel difference + graph cuts. We used difference of gaussian interest points in this test. Gaussian process is a machine learning technique. Gaussian process can be explained in a couple of formulas. Sift is a interest point detector and a descriptor, this algorithm is developed by david lowe and it's interest points should be invariant to scale or affine transformations. 11 the susan corner detector.
Introduction to interest point detectors and descriptors.
Then, following the difference of gaussians setting, we derive the difference between nearby scales. Pixel difference + graph cuts. • computation in gaussian scale pyramid. Difference of gaussian detector are described. This allows detection of interest points in an image, each with their own characteristic scale. 10 the wang and brady corner detection algorithm. Introduction to interest point detectors and descriptors. We used difference of gaussian interest points in this test. .laplace interest point detector, we find log values at the interest points detected and then find the local extremum over the scale values for detecting but when doing the code in matlab, i get output points when i don't take the absolute value of log but when i take its absolute value i don't get any. You can use it to do regression, classification, among many other things. Requirements of a local feature. Search in a small neighborhood around each detected feature when images are taken from nearby points. Gaussian process is a machine learning technique.
„ each point is compared to its 8 neighbors in the current image and 9 neighbors each in the scales. Different interest point detectors are compared using these two criteria. This allows detection of interest points in an image, each with their own characteristic scale. Introduction to interest point detectors and descriptors. The dog detector 10 detects stable keypoints across image scales.
Https Hal Inria Fr Inria 00548252 Document from Evaluation of interest point detectors. Image interest point detectors and their properties. Then, following the difference of gaussians setting, we derive the difference between nearby scales. The different interest point detectors had a large impact on detection performance, as well. The the difference of gaussians (dog) is an approximation of the laplacian of gaussians, but computed in a simpler and faster manner using the difference of. Have already been evaluated with respect to common geometrical. „ each point is compared to its 8 neighbors in the current image and 9 neighbors each in the scales. • scale invariant region detection.
Search in a small neighborhood around each detected feature when images are taken from nearby points.
.laplace interest point detector, we find log values at the interest points detected and then find the local extremum over the scale values for detecting but when doing the code in matlab, i get output points when i don't take the absolute value of log but when i take its absolute value i don't get any. You can use it to do regression, classification, among many other things. The interest point is the anchor point, and often provides the scale, rotational, and illumination invariance attributes for the descriptor; An interest point is a point in the image which in general can be characterized as follows:12. Gesture recognition, mosaic generation, etc. Difference of gaussian detector are described. The rst stage of computation searches over all scales and image locations. The different interest point detectors had a large impact on detection performance, as well. This allows detection of interest points in an image, each with their own characteristic scale. 2 result of image alignment: Sift is a interest point detector and a descriptor, this algorithm is developed by david lowe and it's interest points should be invariant to scale or affine transformations. We used difference of gaussian interest points in this test. 10 the wang and brady corner detection algorithm.
„ gaussian is an ad hoc solution of heat diffusion equation. He experimented with both the determinant of the hessian matrix as well focusing on speed, lowe 12 proposed to approximate the laplacian of gaussians (log) by a difference of gaussians (dog) filter. Have already been evaluated with respect to common geometrical. An interest point is a point in the image which in general can be characterized as follows:12. 2 result of image alignment:
Http Gertkootstra Com Ecse Day 2 Part 1 Interest Points Pdf Phpsessid A184c46825164d8df1657872de228201 from We want our match to be reliable, invariant t geometric (translation, rotation, scale) and photometric (brightness, exposure) differences in the two. Gaussian process is a machine learning technique. .laplace interest point detector, we find log values at the interest points detected and then find the local extremum over the scale values for detecting but when doing the code in matlab, i get output points when i don't take the absolute value of log but when i take its absolute value i don't get any. Gesture recognition, mosaic generation, etc. Path detection and obstacle avoidance algorithms. Key point localization with dog. The rst stage of computation searches over all scales and image locations. Then, following the difference of gaussians setting, we derive the difference between nearby scales.
Different interest point detectors are compared using these two criteria.
• interest point detectors, in general, detect corners. Image interest point detectors and their properties. Gesture recognition, mosaic generation, etc. But there is abundant intuitions and implications behind those formulas. Gaussian process is a machine learning technique. Key point localization with dog. Search in a small neighborhood around each detected feature when images are taken from nearby points. Introduction to interest point detectors and descriptors. 10 the wang and brady corner detection algorithm. Difference between current frame and reference frame before (left) and. • a dense approach (using all pixels) will be far too slow. Sift is a interest point detector and a descriptor, this algorithm is developed by david lowe and it's interest points should be invariant to scale or affine transformations. „ gaussian is an ad hoc solution of heat diffusion equation.
Related : Difference Of Gaussian Interest Point Detector - Requirements of a local feature..